Автоматичний активний вимірювальний прилад
Застосування продукту
Прогнозне керування гнучкою системою, що застосовується до прогнозного керування, полягає в поєднанні вимірювання та вимірювання обробки під час обробки для формування замкнутої системи вимірювання для контролю стану обробки верстата та забезпечення відсутності системи керування відходами обробки. Гнучке керування верстатом може бути досягнуто за допомогою контролера в мінімальній замкнутій системі, здатній виконувати обробку та подальшу обробку вимірювань. Вимірювальний прилад, поєднаний з комп'ютером, та подальший зв'язок з верхнім та нижнім верстатами, може реалізувати загальне єдине керування автоматичною лінією. Таким чином, можна побудувати високоефективну автоматичну виробничу лінію без обробки відходів. Крім того, різноманітні датчики, що відповідають різним зовнішнім об'єктам для виявлення, можуть гарантувати, що вся система не зазнає зовнішнього впливу.
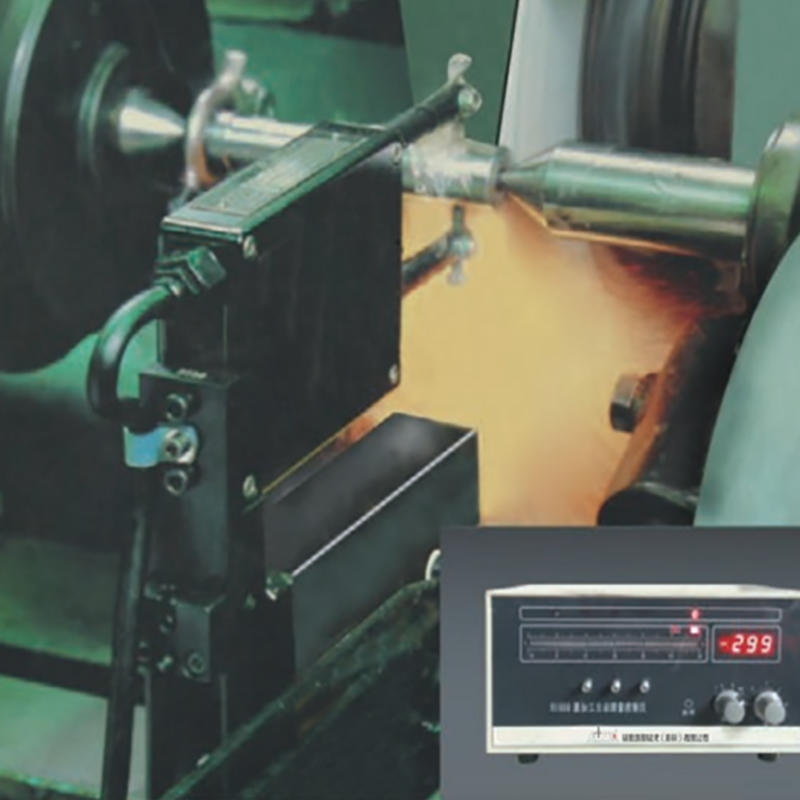
Процес визначення активного вимірювання. Під час обробки вимірювальний пристрій вимірює заготовку в будь-який момент часу та вводить результати вимірювання в контролер. У заданій точці сигналу контролер надсилає сигнал для керування роботою верстата. Наприклад, під час процесу шліфування, подачі для грубого шліфування, коли контролер подає сигнал про перший розмір, верстат перемикається з подачі для грубого шліфування на тонке шліфування, коли досягає другої точки сигналу розміру, верстат перемикається з подачі для тонкого шліфування на легке шліфування (без іскрового шліфування), коли досягає третьої точки сигналу, заготовка повертається до заданого розміру, шліфувальний круг швидко повертається та переходить у стан очікування наступного циклу.
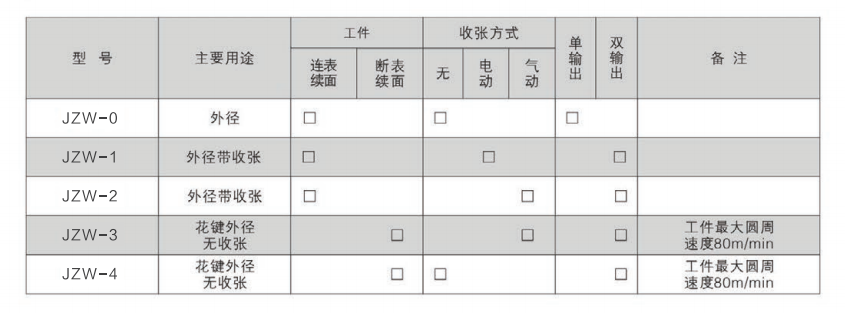
Параметр продукту
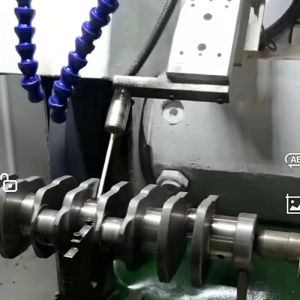
відео про продукт

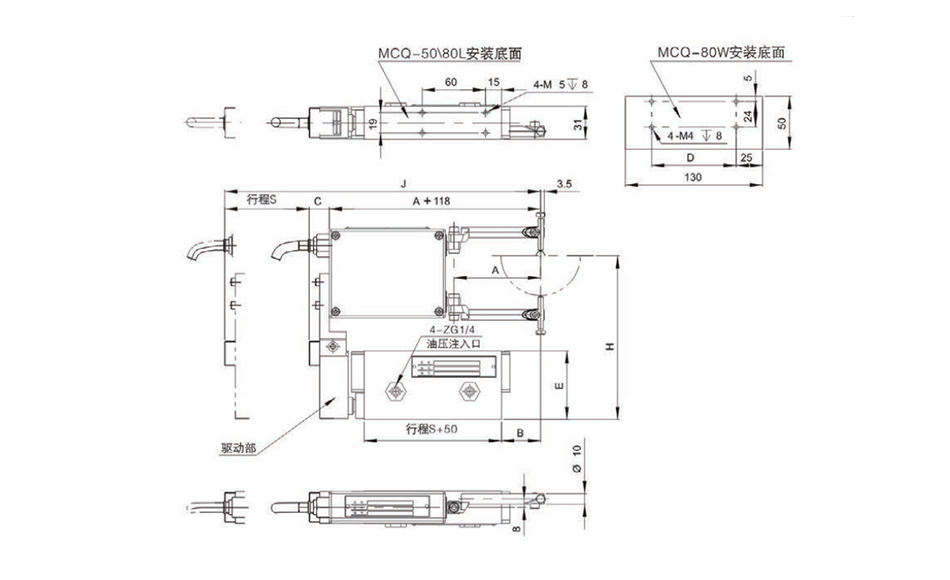
Розмір продукту